

Bust Common Myths About Java Programming
Loading
Tensile Strength and Capacity Control of the W-Shape Sections According to AISC 360-16
Estados de Vigas de Concreto
Loading
Concrete Cylinder Strength Vs Cube Strength
Loading
Earthquake Design Action Calculation
Sıvılaşma Verileri Tablosu
EM Wave Propagation Calculator
Loading
Concrete Column Designer to AS3600
section properties with units
Forward Kinematics of Robotic Arm with 6 Degrees of Freedom
İKSA YAPILARI PROJELENDİRME HİZMET BEDELİ (2024)
GEOTEKNİK RAPOR (EK-B) ASGARİ HİZMET BEDELİ (2024)
ZEMİN İYİLEŞTİRME/DERİN TEMEL PROJELENDİRME ASGARİ HİZMET BEDELİ (2024) (İMO)
🚀
Projectile motion
Loading
Dezi et. al (2010)
🤾
Projectile motion
The moment of inertia, also known as the second moment of area, also known as the moment of inertia, is a geometrical property that measures how "stiff" a cross-sectional shape is. In other words, a measure of a cross-sections resistance to bending and deflection. The second moment of area is typically denoted by
, and its unit of dimension is a unit value of length to the fourth power, i.e.
Explore our Moment of Inertia calculators below for different section types.
Calculators
Moment of Inertia Calculator: Solid Rectangular Section
Moment of Inertia Calculator: Rectangular Hollow Section (SHS/RHS)
Moment of Inertia Calculator: Solid Circular Section
Moment of Inertia Calculator: Circular Hollow Section
Moment of Inertia Calculator: I Beam
Moment of Inertia Calculator: T Section
Moment of Inertia Calculator: Angle Section
Moment of Inertia Calculator: Channel Section
Moment of Inertia Calculator: Triangular Section
Moment of Inertia Calculator: Trapezoidal Area Section
Explanation
The basics
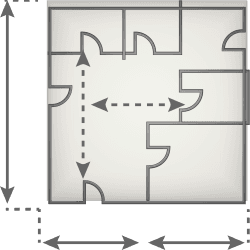
To visualise this property, suppose you have a rectangular plank of wood and are using it to cross a void. You can orientate it flat, as shown on the right of the adjacent image, or you can rotate it vertically onto its side, as shown on the left.
Intuitively, you know that the arrangement on the left will bend less if you stood on it. The plank cross-sections are the same, the area, and its material properties are the same. Yet, by rotating the plank onto its side, its geometry in relation to the axis of bending, and therefore the moment of inertia, has changed significantly.
So as you can see,
is not a fixed value that is unique to each cross-section; it changes depending on the location of the bending (or reference) axis. Parallel Axis Theorem
The parallel axis theorem involves relating the moment of inertia of a cross-section about an arbitrary reference axis to its moment of inertia about a parallel centroidal axis. This theorem is useful because knowing the centroidal moment of inertia of a shape means its moment of inertia can be calculated about any parallel axis by adding a correction factor.
The parallel axis theorem is as follows:
Where:
- is the second moment of area about the centroid of a segment of the cross-section
- is the area of a segment of the cross-section
- is the distance from the segment centroid to the parallel axis under consideration
This theorem is particularly useful when the moment of inertia of a complex shape with multiple parts needs to be calculated.
The moment of inertia of the entire cross-section about its centroid is equivalent to the sum of the moments of inertia of each segment about its own centroidal axis and the parallel axis terms.
If there are any holes or voids within the cross sections, their moment of inertia must also be calculated but subtracted from the total.
Key applications
General member deflection under load
The moment of inertia is a measure of how stiff a beam is against bending. When a bending force is applied, the amount the beam bends is proportional to its moment of inertia. The equation looks like this:
where
is the Young's modulus, a property of the material, and
the curvature of the beam due to the applied load. The curvature
is determined by the deflection of the beam,
, along the x-axis. It is defined by the differential equation:
In general, the more bending force you apply, the less the beam will bend if it has a high moment of inertia.
Moment of inertia in structural engineering
In the field of structural engineering,
of a structural member, like a beam or a column, is a property that is used in the calculation of bending stress and deflection. - Bending stress: the stress that an object encounters when it is subjected to a large load at a particular point, causing it to bend.
- Deflection: is also known as displacement, is how much an element like a beam displaces from its original position. Deflection can occur from externally applied loads or the structure's self-weight.
This raises a question: why don't engineers just use a cross-section with the highest moment of inertia?
The answer is cost and carbon! A cross-section like a rectangle is strong, but more materials must be used. The trade-off between amount of material and structural strength is a constant consideration in design.
Related Resources
Check out our library of engineering tools here!