

Bust Common Myths About Java Programming
Loading
Tensile Strength and Capacity Control of the W-Shape Sections According to AISC 360-16
Estados de Vigas de Concreto
Loading
Concrete Cylinder Strength Vs Cube Strength
Loading
Earthquake Design Action Calculation
Sıvılaşma Verileri Tablosu
EM Wave Propagation Calculator
Loading
Concrete Column Designer to AS3600
section properties with units
Forward Kinematics of Robotic Arm with 6 Degrees of Freedom
İKSA YAPILARI PROJELENDİRME HİZMET BEDELİ (2024)
GEOTEKNİK RAPOR (EK-B) ASGARİ HİZMET BEDELİ (2024)
ZEMİN İYİLEŞTİRME/DERİN TEMEL PROJELENDİRME ASGARİ HİZMET BEDELİ (2024) (İMO)
🚀
Projectile motion
Loading
Dezi et. al (2010)
🤾
Projectile motion
Verified by the CalcTree engineering team on August 8, 2024
This calculator analyses and checks each bolt in a bolt group for in-plane and of-of-plane loading. The bolt group is analysed using the Instantaneous Centre of Rotation (ICR) concept. The shear force, tension (pull-out) force and combined action in each bolt is then checked to validate the bolt group.
All calculations are performed in accordance with AS4100-2020.
Calculation
Assumptions
This calculator:
- Assumes the plate elements being joined by bolts behave rigidly in the plane of the bolt group
- Assumes all bolts in the bolt group are the same size
- Considers all bolt coordinates relative to an origin which defined by the bottom left corner bolt in the bolt group
- Will display the results of up to 10 bolts. For bolt groups with more bolts, use the spreadsheet directly.
- Does not account for grade 10.9 bolts, hence in the bolt shear capacity equation
- Does not consider increased bolt tensions due to prying actions
- Does not calculate the crushing capacity of the ply material from bolt bearing, or the bearing capacity of the ply material from bolt tear out
- Assumes standard holes for 8.8/TF bolts shear capacity check (i.e. ). That is, slotted and oversized holes are not take into account.
- Will check the serviceability limit state if 8.8/TF bolts are selected. Therefore, serviceability loads should be inputted if 8.8/TF bolts are selected. To check 8.8/TF bolts in the ultimate limit state, the user can select 8.8/TB bolts which have the same properties as 8.8/TF bolts in ULS.
- Conservatively assumes the neutral axis is at the same position as the bolt group centroid, which is used when calculating the tension in each bolt due to out-of-plane loading.
Bolt Properties
Bolt grade
:8.8
Tensioning spec
:S
Bolt type
:8.8/S
fuf
:830MPaBolt category
Australia uses two categories of bolts and three tensioning specifications.
Bolt category:
- 4.6 bolts are made from a low carbon steel. The value .
- 8.8 bolts are made from a high-strength, heat-treated, medium carbon steel. The value .
Bolt tensioning specifications:
- "S" is a snug-tightened bolt
- "TB" is a fully tensioned bolt using the bearing types
- "TF" is a fully tensioned bolt using the friction type
The applications for the bolt types are provided below.
👉Note if 8.8/TF bolts are selected, this calculator provides results for the serviceability limit state check, see Explanation section below. To check 8.8/TF bolts in the ultimate limit state, the user can select 8.8/TB bolts which have the same properties as 8.8/TF bolts in ULS.
lj
:0 mm
kr
:1.0Bolt splice
For bolted splice connections (also known as lap connections),
is the distance from the first to the last bolt on each side of splice.
This distance affects the reduction factor
in the bolt shear capacity equation as per Table 9.2.2.1 of AS4100. For values of
, the shear capacity is reduced to account for uneven shear distribution, which occurs in connections where plates behave in a more flexible manner.
For non-splice connections,
and
.
Threads?
:IncludedThreads included or excluded
A bolt will either be classed with "threads included" which is standard practice, or "threads excluded" which is non-standard practice. Therefore the
or
will become zero in the bolt shear capacity equation, respectively.The shear capacity is greater if the bolt has threads excluded.
n
:1Shear planes
The number of shear planes:
- = 1, when two plates are bolted to each other
- = 2, when there are two plates on one side sandwiching the inside plate
The number of shear planes has symbol
for bolts with threads included, or
for bolts with threads excluded.
μ
:0.3Slip factor (for 8.8/TF bolts only)
The design value of the slip factor (aka the coefficient of friction) depends on the surface preparation for the category 8.8/TF bolts in the serviceability limit state.
👉Note if 8.8/TF bolts are not selected, this parameter is not applicable and won't affect the calculation.
The Steel Designers' Handbook provides a table of
values, see below.
We provide three options for
in this calculator:
.
Bolt Group Geometry
# of rows
:4
Spacing of rows
:50 mm
# of columns
:2
Spacing of columns
:50mm
Total number of bolts
:8
x_centroid
:25mm
y_centroid
:75mmBolt group centroid
The bolt group centroid coordinates
are given by:
Where:
- are the coordinates of the bolts
- is the total number of bolts in the bolt group
I_p
:3.00e+4mm4
Polar second moment of area
The polar second moment of area of the bolt group,
is given by:
Where:
- are the horizontal and vertical distances, respectively from bolt to bolt group centroid
- are the second moment of areas about the weld group centroid in the x- and y-axis.
👉Note, since we assume all bolts in the bolt group are the same size, each bolt has a section area of 1. Therefore the second moment of areas about the centre of each bolt is negligible, and the added second moment of areas due to the offset between the bolt group centroid and the center of each bolt are the terms that remains in
. In-plane Loads
F*x
:100 kN
F*y
:200 kN
ex
:0.2 m
ey
:0.1 m
M*z
:10 kN m
M*1
:40kN mNotes
- input the design actions using the sign convention in the image below, hence:
- andare the force eccentricities from the bolt group centroid. Refer to the coordinates of the bolt group centroid in order to determine yourand.
Out-of-plane Loads
V*o
:100 kN
e
:0.3 m
M*o
:30.0kN mNotes
A shear force
applied out-of-plane to the bolt group at an eccentricity
, results in a moment
which then induced axial forces in the bolts.
Single Bolt Capacities
Chosen bolt type
:Threaded 8.8/S Bolt in Single shear
0 | 104 | 163 | 234 | 373 | ||
Single shear | 0 | 59.3 | 92.6 | 133 | 214 |
Bolt Group Check
V*f_max
:126.7kN
N*tf_max
:20.5kNBolt Group Analysis
The bolts furthest from the bolt group centroid will be the most loaded.
The in-plane design force per bolt,
is:
The out-of-plane design tension force per bolt,
is:
Read our Explanation section below for further details about bolt group analysis.
ϕ
:0.8Capacity factor
The capacity reduction factor
is always 0.8, as per Table 3.4 of AS4100, except for 8.8/TF bolts in serviceability limit state,
is 0.7.
Minimum required bolt
:M24Evaluation of each bolt in the bolt group is provided below:
0 | 0 | 105 | 0 | | | | SAFE | SAFE | |
2 | 0 | 50 | 62 | 0 | | | SAFE | SAFE | SAFE |
3 | 0 | 100 | 74 | 7 | | | SAFE | SAFE | SAFE |
4 | 0 | 150 | 127 | 20 | | | | SAFE | SAFE |
5 | 50 | 0 | 88 | 0 | | | SAFE | SAFE | SAFE |
6 | 50 | 50 | 22 | 0 | | SAFE | SAFE | SAFE | SAFE |
7 | 50 | 100 | 47 | 7 | | SAFE | SAFE | SAFE | SAFE |
8 | 50 | 150 | 113 | 20 | | | | SAFE | SAFE |
| | | | | | | | | |
| | | | | | | | | |
👉Note,
are the bolt coordinates from an origin point defined by the bottom left bolt and are in
. The design loads
are in
.Explanation
Connections in building structures use a minimum of two bolts and often more than eight bolts. The bolts used in a connection form a bolt group. A bolt group may be acted on by loads and bending moments in the plane of the bolt group (in-plane) or at right angles to it (out-of-plane).
A typical connection with a bolt group is a beam to column bolted connection.
Bolt capacity
Bolts are required to be checked individually for shear and tensile loads, as well as with a combined action check.
The shear and tensile capacities of bolts are both based on the minimum tensile strength
rather than the yield strength.Explore the toggles below for the bolt capacity equations to AS4100.
Bolts in shear
As per Cl 9.2.2.1 AS4100, the shear capacity of a bolt
is given by:
Where:
- is the capacity reduction factor and is always 0.8, as per Table 3.4 of AS4100
- is the reduction factor for bolted splice connections
- is the minimum tensile strength of the bolt
- is the core area (at the root of the threads)
- is the shank area of the bolt
- is the # of shear planes in the threaded regions
- is the # of shear planes in the unthreaded region
👉A bolt will either be classed with "threads included" which is standard practice, or "threads excluded" which is non-standard practice. Therefore the
or
will become zero in the equation above, respectively.
As per Cl 9.2.3.1 of AS4100, an additional serviceability limit state check must be performed for friction-type connections (i.e. for the /TF bolting category) where connection slip is intended to be prevented at serviceability loads. The shear capacity of a bolt for a friction-type connection,
is:
Where:
- is the capacity reduction factor and is 0.7 in this "special" serviceability check as per Cl 3.5.5 of AS4100.
- is the factor for hole type: 1.0 for standard holes, 0.85 for oversize holes and short slots, and 0.70 for long slotted holes. This calculator assumes.
- is the slip factor, which is the coefficient of friction between plies and depends on the surface preparation of 8.8/TF bolts, varying from 0.05 to 0.35.
- is the minimum bolt tension imparted to the bolts during installation, and is typically tabulated per bolt size
- is the number of shear planes
Bolts in tension
As per Cl 9.2.2.2 AS4100, the tension capacity of a bolt
is given by:
Where:
- is the tensile stress area of the bolt
- is the minimum tensile strength of the bolt
Bolts in combined shear and tension
As per Cl 9.2.2.3 AS4100, the combined shear and tension bolt check is given by:
It is common for textbooks to tabulate bolt capacities per bolt size. See the below toggle for such capacities taken from Australian Guidebook for Structural Engineers and the Steel Designers' Handbook.
Design capacity for Class 4.6 and 8.8 bolts
Tensile and shear (threaded and non-threaded) ULS capacities per bolt size for 4.6/S, 8.8/S, 8.8/TB and 8.8/TF, based on a single shear plane.
Tensile and shear (threaded and non-threaded) ULS capacities per bolt size for 4.6/S, 8.8/S, 8.8/TB and 8.8/TF, based on a single shear plane.
Analysis of bolt groups
Bolt groups are subjected to in-plane and out-of-plane loading. Loads on individual bolts are calculated by using a bolt group analysis.
Explore the toggles below for details on how to analysis bolt group based on loading type.
In-plane Loading
As per Cl 9.3 of AS4100, elastic analysis of weld groups for in-plane loading is permitted using the Instantaneous Centre of Rotation (ICR) concept. The ICR is the point at which the bolt group rotates about when subject to overall bolt group actions. The ICR enables us to calculate the distribution of loads to each bolt in a bolt group.
The method is not described further in AS4100, but is summarised below based on guidance in Steel Designers Handbook.
Analysis of the bolt group uses the ICR concept together with superposition. For a bolt group with in-plane design loading, a pure moment acting on a bolt group has the ICR positioned at the bolt group centroid. Whereas, when the same bolt group is subject to shear force only, the ICR is at infinity. Therefore, for bolt group seeing in-plane shear and moments, superposition of the two individual action effects means uniformly distributing shear forces to all bolts in the group while also assuming the bolt group rotation from moment effects occurs about the group centroid.
👉 Based on superposition of in-plane loading, the bolt group ICR is in the same position as the bolt group centroid.
Design actions
applied away from the centroid of the weld group may be treated as being applied at the centroid plus moments, with forces
and a resolved moment
.
The in-plane design force per bolt,
is:
Where:
- are the x- & y-axis design forces in each bolt
- are the horizontal and vertical distances, respectively, from bolt to bolt group centroid
- is the resolved in-plane moment about the group centroid
- is the total number of bolts in the bolt group
- is the polar second moment of area of the bolt group
The bolt group centroid coordinates
are given by:
Where:
- are the coordinates of the bolts
- is the total number of bolts in the bolt group
Out-of-plane Loading
Out-of-plane loading is ultimately axial loading on bolt groups. A shear force
applied out-of-plane to the bolt group at an eccentricity
, results in a moment
which then induced axial forces in the bolts.
To determine how much axial load is in each bolt is not described in AS4100. We have summarised a method below based on guidance in Steel Designers Handbook.
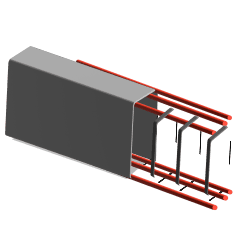
From force/moment equilibrium principles, there are bolts which are not loaded since they are positioned in the bearing (compression) part of the connection. The bolts in the tension region have tension loads that can be evaluated by assuming a linear distribution of force from the neutral axis to the farthest bolts, as shown in the image above. However it is difficult to accurately determine where the neutral axis (NA) exists due to the bolt, plate and support flexibility. A conservative approach, adopted by this calculator, is to assume the NA is at the bolt group centroid line.
From equilibrium principles and the principle of proportioning from similar triangles
The out-of-plane design tension force per bolt,
is:
Where:
- is the resolved out-of-plane moment about the bolt group centroid
- is the vertical distance of a bolt to the NA
- is the distance from the NA to the compression force, which we conservatively assume is the y-coordinate of the bolt group centroid
- is the number of columns in the bolt group
In summary, the analysis of bolt groups follows these steps:
- The centroid of the bolt group is evaluated based on the inputted bolt group geometry.
- All applied loads are calculated as a concentrated resultant loadat the centroid of the bolt group.
- The resultant loads are distributed to each bolt by calculating the shear force and tension forcein each bolt, which is proportional to the distance from the bolt to the group centroid.
- The 'critical' bolt is considered to be the bolt furthest from the centroid, which is used for the design check on the overall bolt group.
References
- Australian Guidebook for Structural Engineers
- Steel Designers' Handbook
- Australian Standard AS 4100:2020
Related Resources
Check out our library of engineering tools here!